Coulomb's Law
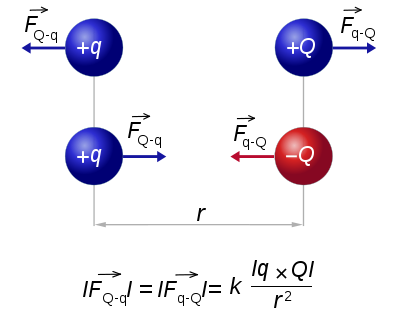
The scalar form of Coulomb's law is an expression for the magnitude and sign of the electrostatic force between two idealized point charges, small in size compared to their separation. This force (F) acting simultaneously on point charges (q1) and (q2), is given by

where r is the separation distance and ke is a proportionality constant. A positive force implies it is repulsive, while a negative force implies it is attractive.[7] The proportionality constant ke, called the Coulomb constant (sometimes called the Coulomb force constant), is related to defined properties of space and can be calculated based on the speed of light to be exactly:[8]

Coulomb's law states that: "The magnitude of the Electrostatics force of interaction between two point charges is directly proportional to the scalar multiplication of the magnitudes of charges and inversely proportional to the square of the distances between them."
In SI units, the meter is defined such that the speed of light in vacuum (or electromagnetic waves, in general), denoted c,[9] is exactly 299,792,458 m·s−1[10], and the magnetic constant (μ0) is set at 4π × 10−7 H·m−1.[11] In agreement with electromagnetic theory, requiring that

the value for the electric constant (ε0) is derived to be ε0 = 1/(μ0c2) ≈ 8.85418782×10−12 F·m−1.[12] In electrostatic units and Gaussian units, the unit charge (esu or statcoulomb) is defined in such a way that the Coulomb constant is 1 and dimensionless.
In the more useful vector-form statement, the force in the equation is a vector force acting on either point charge, so directed as to push it away from the other point charge; the right-hand side of the equation, in this case, must have an additional product term of a unit vector pointing in one of two opposite directions, e.g., from q1 to q2 if the force is acting on q2; the charges may have either sign and the sign of their product determines the ultimate direction of that force. Thus, the vector force pushing the charges away from each other (pulling towards each other if negative) is directly proportional to the product of the charges and inversely proportional to the square of the distance between them. The square of the distance part arises from the fact that the force field due to an isolated point charge is uniform in all directions and gets "diluted" with distance as much as the area of a sphere centered on the point charge expands with its radius.
The law of superposition allows this law to be extended to include any number of point charges, to derive the force on any one point charge by a vector addition of these individual forces acting alone on that point charge. The resulting vector happens to be parallel to the electric field vector at that point, with that point charge (or "test charge") removed.
Coulomb's law can also be interpreted in terms of atomic units with the force expressed in Hartrees per Bohr radius, the charge in terms of the elementary charge, and the distances in terms of the Bohr radius.
Electric field
It follows from the Coulomb's Law that the magnitude of the electric field (E) created by a single point charge (q) at a certain distance (r) is given by:

For a positive charge, the direction of the electric field points along lines directed radially away from the location of the point charge, while the direction is the opposite for a negative charge. The SI units of electric field are volts per meter or newtons per coulomb.
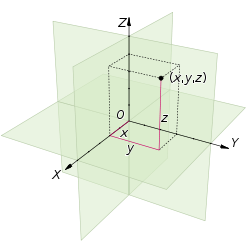
(Diag, Three-dimensional Euclidean space; left)
In mathematics, Euclidean space is the Euclidean plane and three-dimensional space of Euclidean geometry, as well as the generalizations of these notions to higher dimensions. The term “Euclidean” distinguishes these spaces from the curved spaces of non-Euclidean geometry and Einstein's general theory of relativity, and is named for the Greek mathematician Euclid of Alexandria.
From the modern viewpoint, there is essentially only one Euclidean space of each dimension. In dimension one this is the real line; in dimension two it is the Cartesian plane; and in higher dimensions it is the real coordinate space with three or more real number coordinates. Thus a point in Euclidean space is a tuple of real numbers, and distances are defined using the Euclidean distance formula. Mathematicians often denote the n-dimensional Euclidean space by  , or sometimes
, or sometimes  if they wish to emphasize its Euclidean nature. Euclidean spaces have finite dimension.
if they wish to emphasize its Euclidean nature. Euclidean spaces have finite dimension.
Since Euclidean space is a metric space it is also a topological space with the natural topology induced by the metric. The metric topology on En is called the Euclidean topology. A set is open in the Euclidean topology if and only if it contains an open ball around each of its points. The Euclidean topology turns out to be equivalent to the product topology on Rn considered as a product of n copies of the real line R (with its standard topology).
An important result on the topology of Rn, that is far from superficial, is Brouwer's invariance of domain. Any subset of Rn (with its subspace topology) that is homeomorphic to another open subset of Rn is itself open. An immediate consequence of this is that Rm is not homeomorphic to Rn if m ≠ n — an intuitively "obvious" result which is nonetheless difficult to prove.
Euclidean Vector
In elementary mathematics, physics, and engineering, a Euclidean vector (sometimes called a geometric[1] or spatial vector,[2] or – as here – simply a vector) is a geometric object that has both a magnitude (or length) and direction. A Euclidean vector is frequently represented by a line segment with a definite direction, or graphically as an arrow, connecting an initial point A with a terminal point B,[3] and denoted by 
A vector is what is needed to "carry" the point A to the point B; the Latin word vector means "carrier".[4] The magnitude of the vector is the distance between the two points and the direction refers to the direction of displacement from A to B. Many algebraic operations on real numbers such as addition, subtraction, multiplication, and negation have close analogues for vectors, operations which obey the familiar algebraic laws of commutativity, associativity, and distributivity. These operations and associated laws qualify Euclidean vectors as an example of the more generalized concept of vectors defined simply as elements of a vector space.
Vectors play an important role in physics: velocity and acceleration of a moving object and forces acting on it are all described by vectors. Many other physical quantities can be usefully thought of as vectors. Although most of them do not represent distances (such as position or displacement), their magnitude and direction can be still represented by the length and direction of an arrow. The mathematical representation of a physical vector depends on the coordinate system used to describe it. Other vector-like objects that describe physical quantities and transform in a similar way under changes of the coordinate system include pseudovectors and tensors.